Motorizzazione di un modello 3D espositivo
20/05/2024 • Keymodel SRL
Keymodel SRL, azienda specializzata nella stampa 2D e 3D, aveva la necessità di realizzare una motorizzazione per un modello 3D espositivo di circa 1,8 metri e 25 kg. Il modello rappresentava uno scovolino realizzato per una nota azienda specializzata nella salute orale.
Secondo le specifiche del committente, il prodotto doveva ruotare su se stesso in modo lento e continuativo, anche per diverse ore al giorno, partendo alla pressione di un bottone. Sono stato quindi incaricato della realizzazione del sistema elettronico e di controllo per far ruotare l’oggetto in modo stabile e ripetibile.
Date le dimensioni e il peso del modello, la scelta del motore era una parte importante del progetto. Ho scelto un motore passo passo bipolare Stepperonline Nema 23, con corrente nominale di 2,8 A per fase e una coppia di circa 1,9 Nm. Questo tipo di motore è adatto quando serve un movimento controllato e preciso, soprattutto a bassa velocità, perché permette di gestire bene posizione, direzione e progressione del movimento.
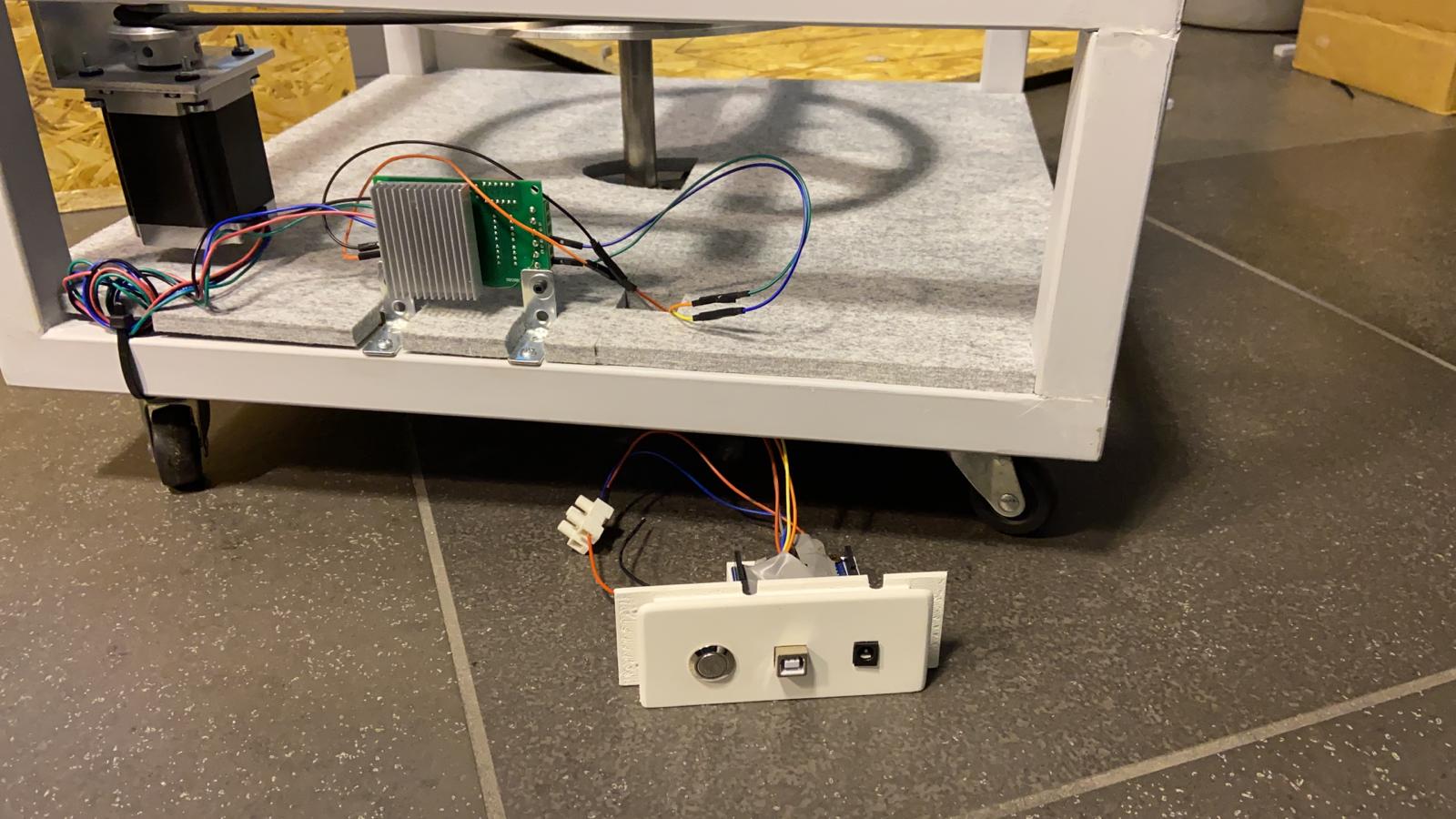
Il motore passo passo è azionato da un driver TB6560 a singolo asse. Ho scelto questo tipo di driver perché supporta correnti fino a circa 3 A, lavora con alimentazione dedicata e permette di usare il microstepping, utile per rendere la rotazione meno brusca e ridurre vibrazioni visibili sul modello.
Il driver è controllato da una scheda Arduino programmata ad hoc secondo le richieste del committente. Il programma gestisce l’avvio tramite pulsante, la direzione di rotazione, la velocità e il comportamento del motore durante l’uso. Ho prestato particolare attenzione alla fluidità dei movimenti, evitando partenze e stop improvvisi tramite accelerazioni e decelerazioni lente.
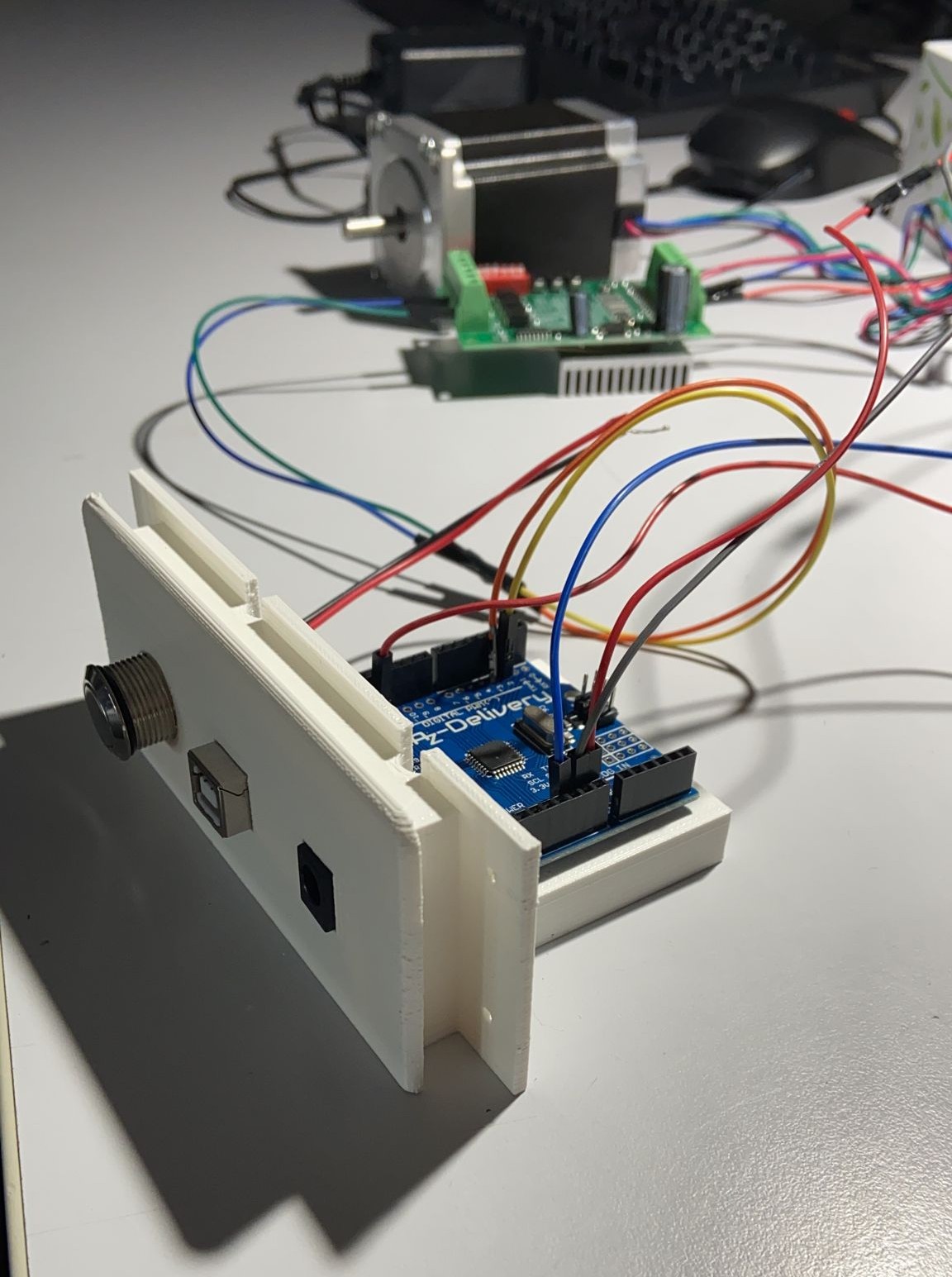
Per permettere eventuali modifiche successive ai parametri di funzionamento, sul pannello di azionamento è stata lasciata accessibile anche la porta USB dell’Arduino. In questo modo è possibile collegarsi alla scheda senza smontare tutto il sistema e aggiornare il programma, ad esempio per cambiare velocità, accelerazione o direzione di rotazione.
Molti test sono stati svolti sul prodotto finale per verificare la continuità della rotazione, la stabilità nel tempo e il livello di vibrazioni durante l’utilizzo. L’obiettivo non era soltanto far girare il modello, ma farlo girare in modo pulito, lento e affidabile, senza movimenti troppo scattosi o rumorosi.
Questo lavoro mi ha permesso di applicare competenze di elettronica, controllo motori e prototipazione a un oggetto fisico reale, con vincoli di peso, spazio e affidabilità. Mi ha anche aiutato a ragionare meglio sul rapporto tra software e meccanica: una modifica al codice, alla velocità o all’accelerazione del motore può cambiare molto il comportamento percepito del prodotto finale.